TORCS Dataset Papers With Code
Por um escritor misterioso
Last updated 28 março 2025

TORCS (The Open Racing Car Simulator) is a driving simulator. It is capable of simulating the essential elements of vehicular dynamics such as mass, rotational inertia, collision, mechanics of suspensions, links and differentials, friction and aerodynamics. Physics simulation is simplified and is carried out through Euler integration of differential equations at a temporal discretization level of 0.002 seconds. The rendering pipeline is lightweight and based on OpenGL that can be turned off for faster training. TORCS offers a large variety of tracks and cars as free assets. It also provides a number of programmed robot cars with different levels of performance that can be used to benchmark the performance of human players and software driving agents. TORCS was built with the goal of developing Artificial Intelligence for vehicular control and has been used extensively by the machine learning community ever since its inception.

PDF] Distributed Approach for implementation of A3C on TORCS

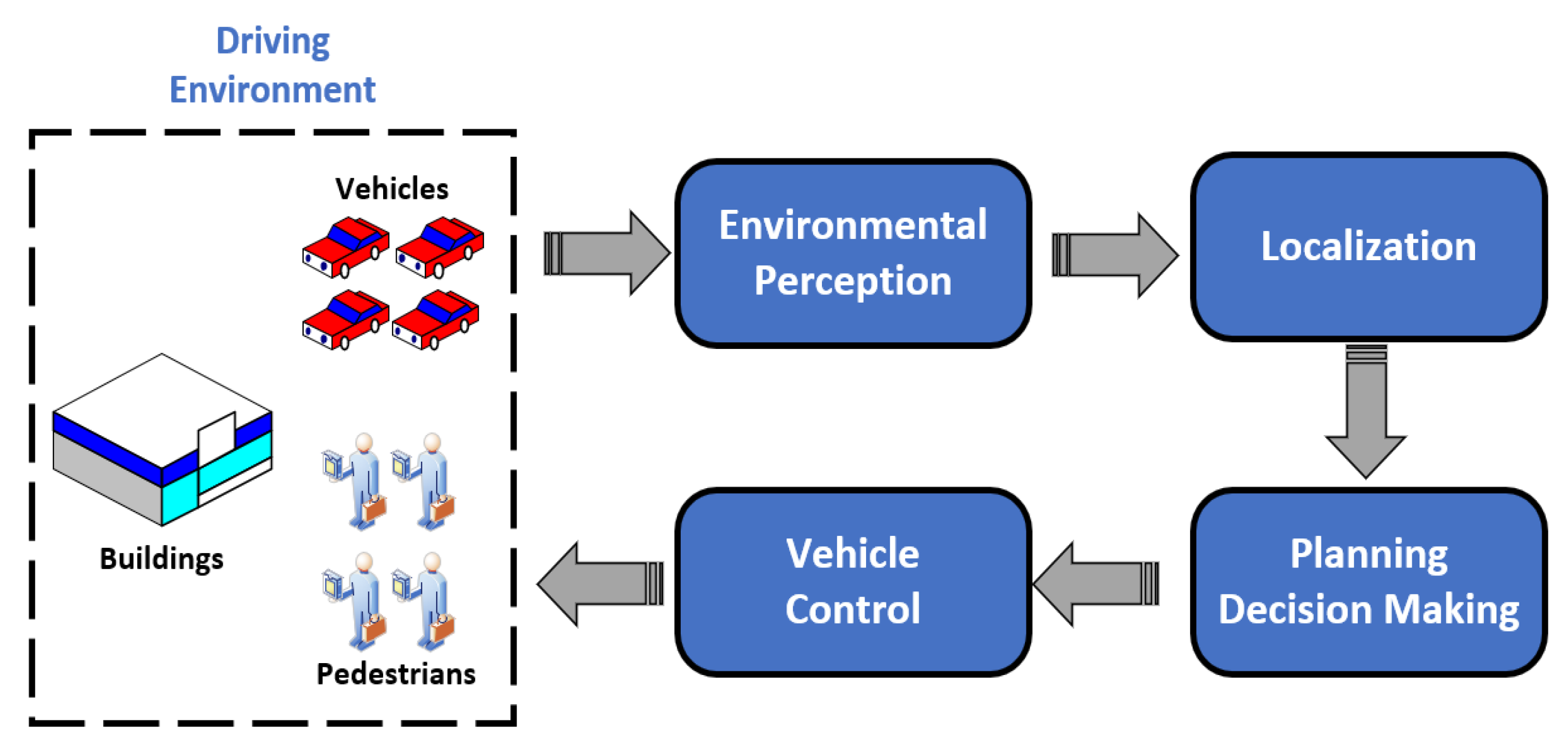
Autonomous Driving
Service-Oriented Computing and System Integration: Software, IoT, Big Data, and AI as Services
Sensors, Free Full-Text
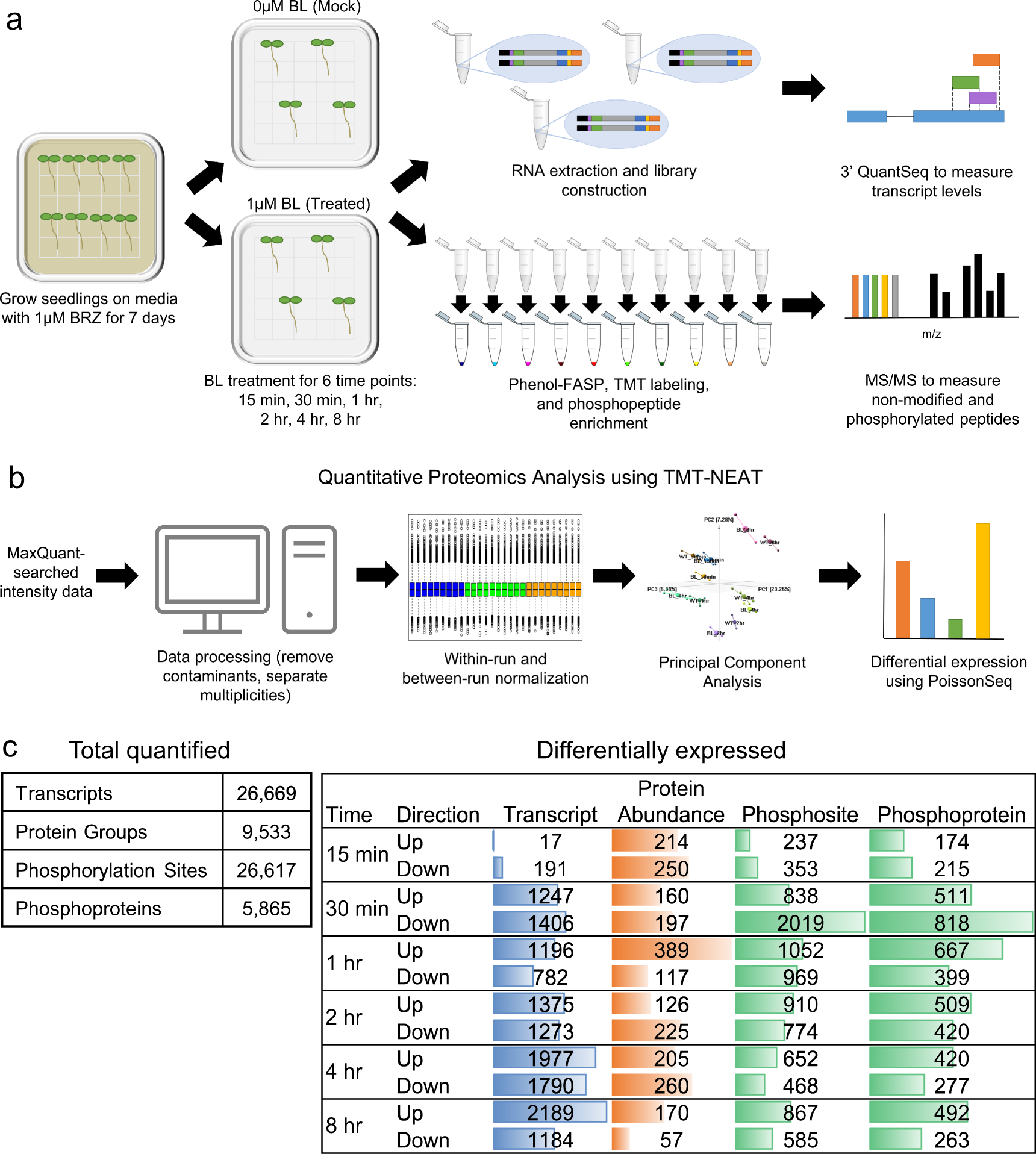
Integrated omics networks reveal the temporal signaling events of brassinosteroid response in Arabidopsis
第14回 配信講義 計算科学技術特論A(2021)

Matthew Muckley on LinkedIn: Announcing version 2.0 of the fastMRI dataset · Discussion #284 ·…
BDCC, Free Full-Text
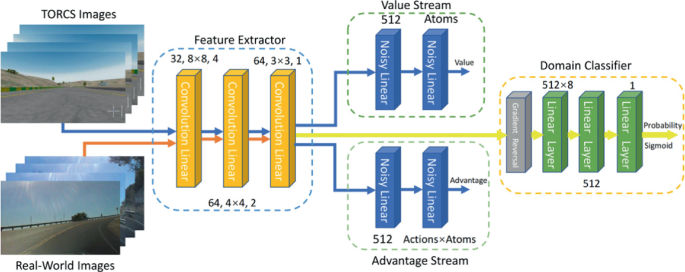
Adversarial Reinforcement Learning for Steering Cars from Virtual to Real World

Graphical TORCS driver model and the corresponding training configurations.

Sohan Rudra - Research Associate - Technische Universität Darmstadt
B Ravi Kiran - CatalyzeX

Pseudo-code of dynamic scheduling framework with grouped whales (DSF.GW)

Deep reinforcement learning for autonomous vehicles: lane keep and overtaking scenarios with collision avoidance
Recomendado para você
-
 Race Clicker codes for December 202328 março 2025
Race Clicker codes for December 202328 março 2025 -
![ALL CODES WORK* [CANDY WORLD] Car Race ROBLOX](https://i.ytimg.com/vi/aMBwms2UAWw/sddefault.jpg) ALL CODES WORK* [CANDY WORLD] Car Race ROBLOX28 março 2025
ALL CODES WORK* [CANDY WORLD] Car Race ROBLOX28 março 2025 -
 Race Merge Simulator Codes (December 2023) - Roblox28 março 2025
Race Merge Simulator Codes (December 2023) - Roblox28 março 2025 -
 Car Race Simulator Codes (December 2023) - Prima Games28 março 2025
Car Race Simulator Codes (December 2023) - Prima Games28 março 2025 -
 Car Race Simulator Codes (December 2023) - Droid Local28 março 2025
Car Race Simulator Codes (December 2023) - Droid Local28 março 2025 -
 Roblox Car Race Codes (December 2023) - Pro Game Guides28 março 2025
Roblox Car Race Codes (December 2023) - Pro Game Guides28 março 2025 -
 Race Merge Simulator Codes for December 2023: Cash and Boosts! - Try Hard Guides28 março 2025
Race Merge Simulator Codes for December 2023: Cash and Boosts! - Try Hard Guides28 março 2025 -
Highway Car Racing 3D Games - Apps on Google Play28 março 2025
-
 Car Driving Plugins, Code & Scripts28 março 2025
Car Driving Plugins, Code & Scripts28 março 2025 -
 SEASIDE ROAD RACE TRACK - Fortnite Creative Map Code - Dropnite28 março 2025
SEASIDE ROAD RACE TRACK - Fortnite Creative Map Code - Dropnite28 março 2025

você pode gostar
-
 Voltorb and Voltorb Hisuian pokemon high-res 3D model 3D printable28 março 2025
Voltorb and Voltorb Hisuian pokemon high-res 3D model 3D printable28 março 2025 -
:max_bytes(150000):strip_icc():focal(999x0:1001x2)/got-20-1-2000-e697960f9cce42f989167e8be2a78451.jpg) HBO Confirms Game of Thrones Prequel House of the Dragon Set to Begin Filming in April28 março 2025
HBO Confirms Game of Thrones Prequel House of the Dragon Set to Begin Filming in April28 março 2025 -
 Cartazes individuais de “Sonic 2” apresentam personagens da aventura; longa estreia em abril28 março 2025
Cartazes individuais de “Sonic 2” apresentam personagens da aventura; longa estreia em abril28 março 2025 -
 Roblox – Códigos do Tapping Gods (julho 2023) - Critical Hits28 março 2025
Roblox – Códigos do Tapping Gods (julho 2023) - Critical Hits28 março 2025 -
 Globo Esporte MG, Cruzeiro sacramenta título com vitória na Bahia28 março 2025
Globo Esporte MG, Cruzeiro sacramenta título com vitória na Bahia28 março 2025 -
 Anime Corner on X: This season's OP MC anime dropped its first episode! Vote for I Got a Cheat Skill in Another World and Became Unrivaled in The Real World, Too in28 março 2025
Anime Corner on X: This season's OP MC anime dropped its first episode! Vote for I Got a Cheat Skill in Another World and Became Unrivaled in The Real World, Too in28 março 2025 -
 Confira a tabela de jogos do Brasil no Pré-Olímpico masculino de vôlei28 março 2025
Confira a tabela de jogos do Brasil no Pré-Olímpico masculino de vôlei28 março 2025 -
 Os 5 demônios mais poderosos de Chainsaw Man até agora - Critical Hits28 março 2025
Os 5 demônios mais poderosos de Chainsaw Man até agora - Critical Hits28 março 2025 -
 Chess opening London System part 1 = basics, themes, concepts28 março 2025
Chess opening London System part 1 = basics, themes, concepts28 março 2025 -
 ONE PIECE film GOLD One piece movies, One piece tumblr, Gold movie28 março 2025
ONE PIECE film GOLD One piece movies, One piece tumblr, Gold movie28 março 2025