Sensors, Free Full-Text
Por um escritor misterioso
Last updated 26 março 2025
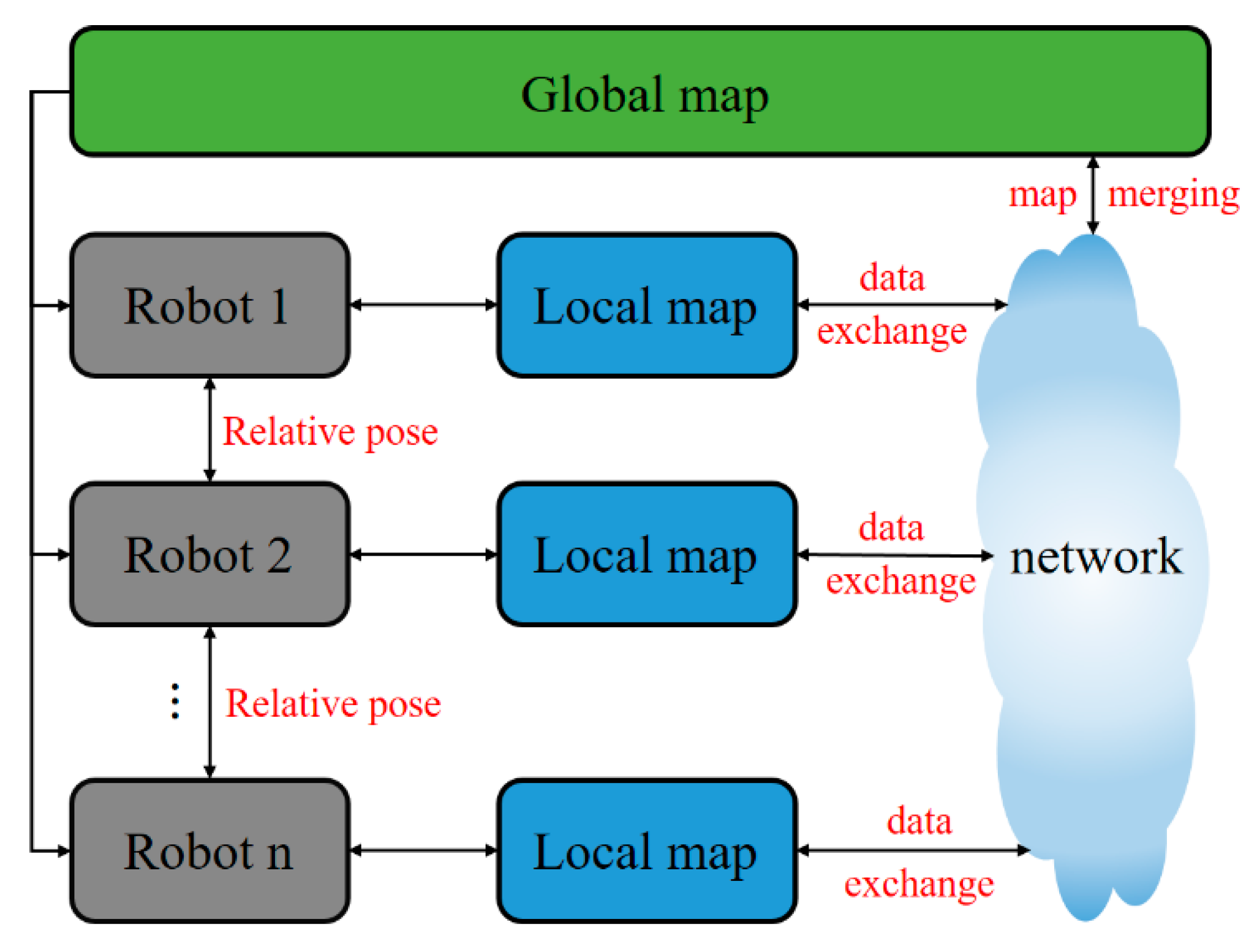
When multiple robots are involved in the process of simultaneous localization and mapping (SLAM), a global map should be constructed by merging the local maps built by individual robots, so as to provide a better representation of the environment. Hence, the map-merging methods play a crucial rule in multi-robot systems and determine the performance of multi-robot SLAM. This paper looks into the key problem of map merging for multiple-ground-robot SLAM and reviews the typical map-merging methods for several important types of maps in SLAM applications: occupancy grid maps, feature-based maps, and topological maps. These map-merging approaches are classified based on their working mechanism or the type of features they deal with. The concepts and characteristics of these map-merging methods are elaborated in this review. The contents summarized in this paper provide insights and guidance for future multiple-ground-robot SLAM solutions.

SimpliSafe Entry Sensor (Pack of 4) - Window and Door

300+ Free ATS Resume Examples - Optimized for 2023
Tekscan Technology

KEYENCE LRW500 Full-Spectrum Sensor for sale online

Advanced Materials: Early View

BOSCH Professional GIS 1000 C Thermo Bluetooth Thermal Camera
Sensor Tower - Market-Leading Digital Intelligence

MySpool Water Level Alert with Text Message and Email
Sensors, Free Full-Text

YoLink Smart Outdoor Motion Detector, Trespassing Alarm, Driveway
Recomendado para você
-
 Festival Curta Cinema 2020 by CURTACINEMA - Issuu26 março 2025
Festival Curta Cinema 2020 by CURTACINEMA - Issuu26 março 2025 -
 MINECRAFT#26 - NOVAS CONSTRUÇÕES DA NOSSA CIDADE MODERNA (LIVRARIA26 março 2025
MINECRAFT#26 - NOVAS CONSTRUÇÕES DA NOSSA CIDADE MODERNA (LIVRARIA26 março 2025 -
 Eduarda Ferrão - Perfil da r mirim em Criadores iD26 março 2025
Eduarda Ferrão - Perfil da r mirim em Criadores iD26 março 2025 -
 Duda Ferrão Games26 março 2025
Duda Ferrão Games26 março 2025 -
 Petición · Have the Peppa Pig Videogame be the Game of the Year26 março 2025
Petición · Have the Peppa Pig Videogame be the Game of the Year26 março 2025 -
 Adversário do América na Copa do Brasil, Ferroviário vive ótima26 março 2025
Adversário do América na Copa do Brasil, Ferroviário vive ótima26 março 2025 -
 Salvador, Bahia - Wikipedia26 março 2025
Salvador, Bahia - Wikipedia26 março 2025 -
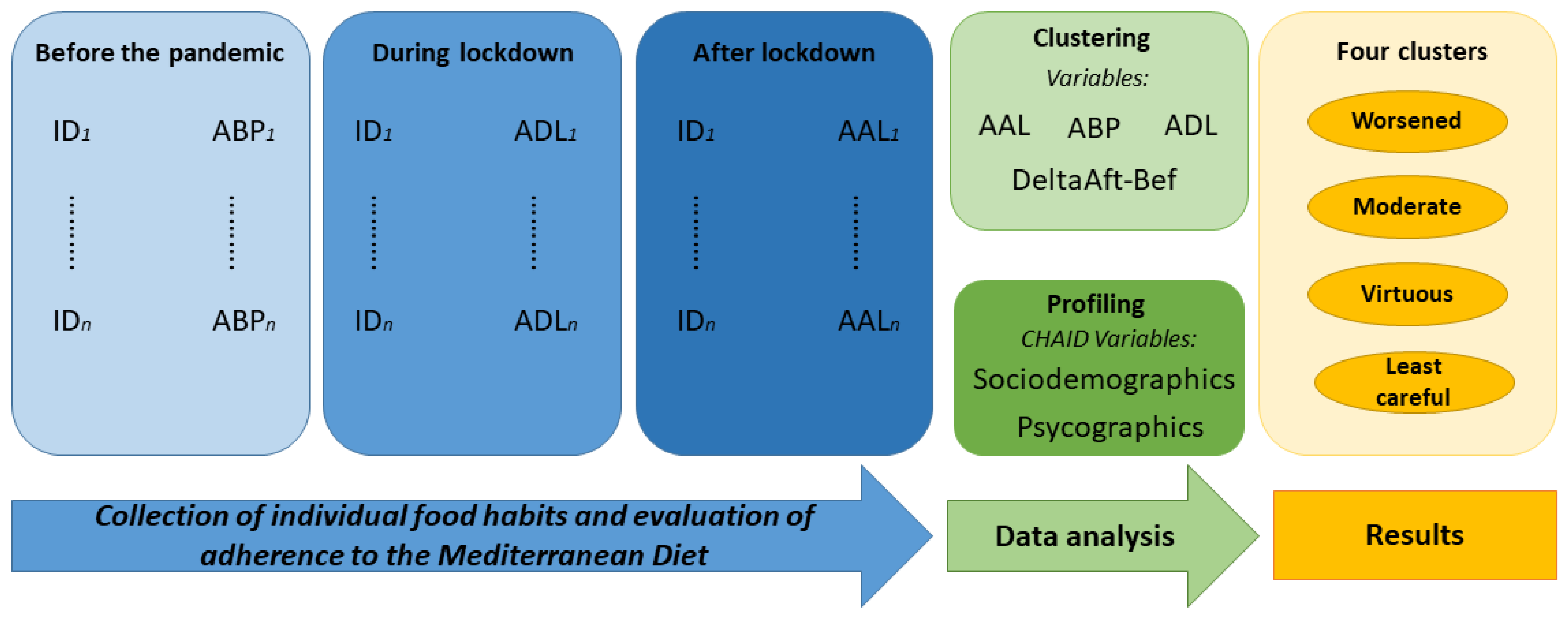 Sustainability, Free Full-Text26 março 2025
Sustainability, Free Full-Text26 março 2025 -
 ROBLOX - DESAFIO ACERTE O DESENHO #226 março 2025
ROBLOX - DESAFIO ACERTE O DESENHO #226 março 2025 -
 Catálogo Circuito Sesc de Artes 2021 - Praças Digitais by Sesc26 março 2025
Catálogo Circuito Sesc de Artes 2021 - Praças Digitais by Sesc26 março 2025
você pode gostar
-
 Xbox Series S on top on a PS4 : r/xboxone26 março 2025
Xbox Series S on top on a PS4 : r/xboxone26 março 2025 -
 Manchester City drawn against Steaua Bucharest as Champions League Playoff draw announced26 março 2025
Manchester City drawn against Steaua Bucharest as Champions League Playoff draw announced26 março 2025 -
 Brinquedo carrinho puxar para trás carros de corrida, mini26 março 2025
Brinquedo carrinho puxar para trás carros de corrida, mini26 março 2025 -
 Apple Retail Store editorial image. Image of cellular - 8916475526 março 2025
Apple Retail Store editorial image. Image of cellular - 8916475526 março 2025 -
 How To Use Roblox Support Ticket (2023)26 março 2025
How To Use Roblox Support Ticket (2023)26 março 2025 -
 Assistir Nanatsu no Taizai: Fundo no Shinpan - Episódio 01 Online - Download & Assistir Online! - AnimesTC26 março 2025
Assistir Nanatsu no Taizai: Fundo no Shinpan - Episódio 01 Online - Download & Assistir Online! - AnimesTC26 março 2025 -
 Grand Piece Online Wiki talk:Codes, Grand Piece Online Wiki26 março 2025
Grand Piece Online Wiki talk:Codes, Grand Piece Online Wiki26 março 2025 -
Under The Waves - Playstation 5 : Target26 março 2025
-
 Como Fazer Roupa de Boneca? Materiais e Passo a Passo!26 março 2025
Como Fazer Roupa de Boneca? Materiais e Passo a Passo!26 março 2025 -
 Arcade Gaming Room 4K Wallpaper iPhone HD Phone #1380i26 março 2025
Arcade Gaming Room 4K Wallpaper iPhone HD Phone #1380i26 março 2025