Efficient and Accurate Candidate Generation for Grasp Pose
Por um escritor misterioso
Last updated 11 abril 2025

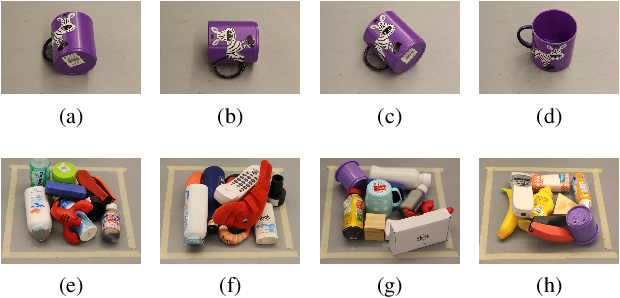
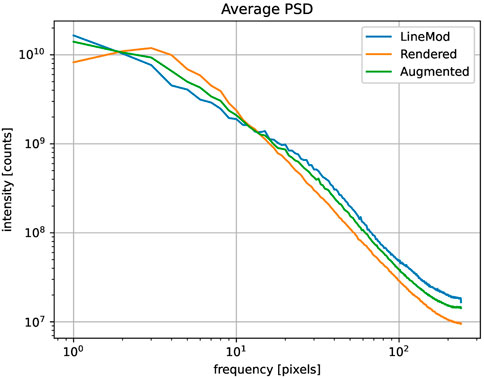
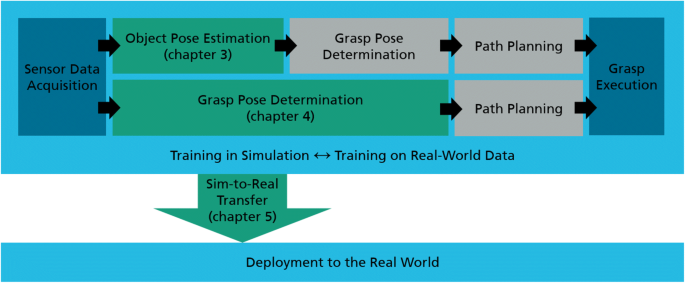
Recently, a number of grasp detection methods have been proposed that can be used to localize robotic grasp configurations directly from sensor data without estimating object pose. The underlying idea is to treat grasp perception analogously to object detection in computer vision. These methods take as input a noisy and partially occluded RGBD image or point cloud and produce as output pose estimates of viable grasps, without assuming a known CAD model of the object. Although these methods generalize grasp knowledge to new objects well, they have not yet been demonstrated to be reliable enough for wide use. Many grasp detection methods achieve grasp success rates (grasp successes as a fraction of the total number of grasp attempts) between 75% and 95% for novel objects presented in isolation or in light clutter. Not only are these success rates too low for practical grasping applications, but the light clutter scenarios that are evaluated often do not reflect the realities of real world grasping. This paper proposes a number of innovations that together result in a significant improvement in grasp detection performance. The specific improvement in performance due to each of our contributions is quantitatively measured either in simulation or on robotic hardware. Ultimately, we report a series of robotic experiments that average a 93% end-to-end grasp success rate for novel objects presented in dense clutter.
PDF] Efficient and Accurate Candidate Generation for Grasp Pose

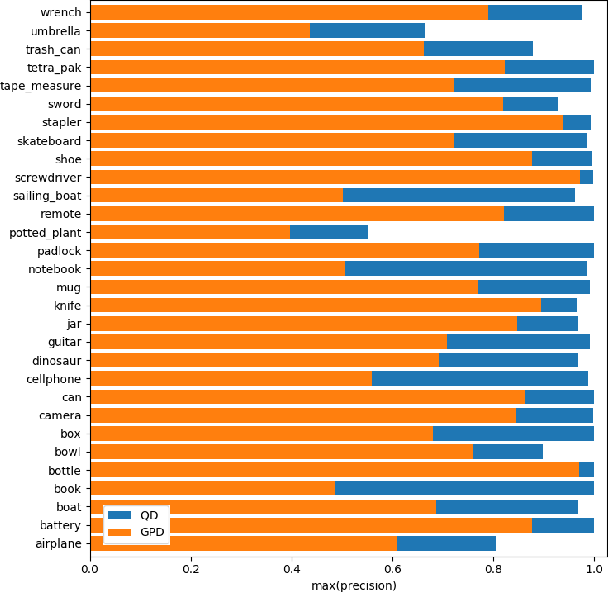
Evaluation on the GraspNet dataset

Grasp Pose Detection in Point Clouds - Andreas ten Pas, Marcus
Biomimetics, Free Full-Text

A grasps-generation-and-selection convolutional neural network for

Grasp Pose Detection in Point Clouds - Andreas ten Pas, Marcus

Efficient and Accurate Candidate Generation for Grasp Pose
PDF] Efficient and Accurate Candidate Generation for Grasp Pose
Frontiers Robotics Dexterous Grasping: The Methods Based on
Frontiers 6IMPOSE: bridging the reality gap in 6D pose
A Survey on Learning-Based Robotic Grasping

Grasp Pose Detection in Point Clouds - Andreas ten Pas, Marcus
Recomendado para você
-
 3ª edição - Candidate-se já - Prémio 'Cidades e Territórios do11 abril 2025
3ª edição - Candidate-se já - Prémio 'Cidades e Territórios do11 abril 2025 -
 Se Candidate, Mulher! levanta R$ 1,2 mi para acelerar11 abril 2025
Se Candidate, Mulher! levanta R$ 1,2 mi para acelerar11 abril 2025 -
 MUVA on X: Atenção Pemba‼️ Estendemos o prazo das inscrições11 abril 2025
MUVA on X: Atenção Pemba‼️ Estendemos o prazo das inscrições11 abril 2025 -
 Adjustable Universal Motorcycle Phone Mount Candidate-se A Loncin11 abril 2025
Adjustable Universal Motorcycle Phone Mount Candidate-se A Loncin11 abril 2025 -
 Prémio Máxima de Beleza e Perfumes 2024. Candidate-se aqui11 abril 2025
Prémio Máxima de Beleza e Perfumes 2024. Candidate-se aqui11 abril 2025 -
 Candidate-se à segunda edição do Hackathon 100% Colaborativo11 abril 2025
Candidate-se à segunda edição do Hackathon 100% Colaborativo11 abril 2025 -
 Candidate-se para participar de um estudo clínico11 abril 2025
Candidate-se para participar de um estudo clínico11 abril 2025 -
 CANDIDATE-SE A CONSELHEIRO/A E AJUDE A FISCALIZAR AS CONTAS DO11 abril 2025
CANDIDATE-SE A CONSELHEIRO/A E AJUDE A FISCALIZAR AS CONTAS DO11 abril 2025 -
Cocal no LinkedIn: Nova vaga disponível: ENCARREGADO(A) AGRÍCOLA11 abril 2025
-
 Oportunidades abertas para Projetos de Compensação Ambiental – IABS, o Instituto Brasileiro de Desenvolvimento e Sustentabilidade11 abril 2025
Oportunidades abertas para Projetos de Compensação Ambiental – IABS, o Instituto Brasileiro de Desenvolvimento e Sustentabilidade11 abril 2025

você pode gostar
-
 Pan Super Saiyan II by NeDan89 on deviantART11 abril 2025
Pan Super Saiyan II by NeDan89 on deviantART11 abril 2025 -
 Lichess – Wikipédia, a enciclopédia livre11 abril 2025
Lichess – Wikipédia, a enciclopédia livre11 abril 2025 -
 Anim #8#Nft#Ape#joker - Nft Animation collectionn11 abril 2025
Anim #8#Nft#Ape#joker - Nft Animation collectionn11 abril 2025 -
 Lithoform Engine (Zendikar Rising)11 abril 2025
Lithoform Engine (Zendikar Rising)11 abril 2025 -
 A Lego Sonic the Hedgehog set has seemingly leaked ahead of an official reveal11 abril 2025
A Lego Sonic the Hedgehog set has seemingly leaked ahead of an official reveal11 abril 2025 -
Flowy Natural Wavy Anime Messy Hair Hot Pink's Code & Price - RblxTrade11 abril 2025
-
 Epic Games Store was bugged, or no? Next free game will be Watch Dogs 2🤞 : r/ubisoft11 abril 2025
Epic Games Store was bugged, or no? Next free game will be Watch Dogs 2🤞 : r/ubisoft11 abril 2025 -
 Kage Kage no Mi(Fruta da Sombra), Wiki11 abril 2025
Kage Kage no Mi(Fruta da Sombra), Wiki11 abril 2025 -
 Instalação de equipamentos de combate a incendio - RAVA CAMPOS11 abril 2025
Instalação de equipamentos de combate a incendio - RAVA CAMPOS11 abril 2025 -
 Where is Eevee in fire red?11 abril 2025
Where is Eevee in fire red?11 abril 2025